
How Do Metal Detectors Work?
Metal detectors work by transmitting an electromagnetic field from the search coil into the ground. Any metal objects (targets) within the electromagnetic field will become energised and retransmit an electromagnetic field of their own. The detector’s search coil receives the retransmitted field and alerts the user by producing a target response. Minelab metal detectors are capable of discriminating between different target types and can be set to ignore unwanted targets.
1. Control Box
The control box contains the detector’s electronics. This is where the transmit signal is generated and the receive signal is processed and converted into a target response.
2. Search Coil
The detector’s search coil transmits the electromagnetic field into the ground and receives the return electromagnetic field from a target.
3. Transmit Electromagnetic Field (visual representation only - blue)
The transmit electromagnetic field energises targets to enable them to be detected.
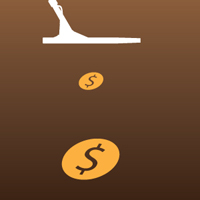
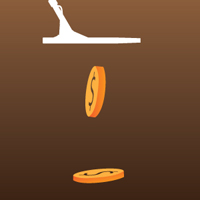
4. Target
A target is any metal object that can be detected by a metal detector. In this example, the detected target is treasure, which is a good (accepted) target.
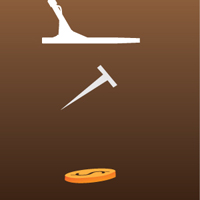
5. Unwanted Target
Unwanted targets are generally ferrous (attracted to a magnet), such as nails, but can also be non-ferrous, such as bottle tops. If the metal detector is set to reject unwanted targets then a target response will not be produced for those targets.
6. Receive Electromagnetic Field (visual representation only - yellow)
The receive electromagnetic field is generated from energised targets and is received by the search coil.
7. Target Response (visual representation only - green)
When a good (accepted) target is detected the metal detector will produce an audible response, such as a beep or change in tone. Many Minelab detectors also provide a visual display of target information such as an ID number or 2 dimensional display.
Frequency
The frequency of a metal detector is one of the main characteristics that determines how well targets can be detected. Generally, a single frequency detector that transmits at a high frequency will be more sensitive to small targets and a single frequency detector that transmits at low frequencies will give more depth on large targets. Minelab’s single frequency technologies are VLF and VFLEX.
Minelab’s world-leading BBS, FBS, MPS and new revolutionary Multi-IQ technologies transmit multiple frequencies simultaneously and are therefore sensitive to small and deep large targets at the same time.
Ground Balance
Ground Balance is a variable setting that increases detection depth in mineralised ground. This ground may contain salts, such as in wet beach sand or fine iron particles, such as in red earth. These minerals respond to a detector’s transmit field in a similar way that a target does. Due to the much larger mass of the ground compared to a buried target, the effect of mineralisation can easily mask small targets. To correct this the Ground Balance setting removes the responding ground signals, so you clearly hear target signals and are not distracted by ground noise.
There are three main types of Ground Balance:
1. Manual Ground Balance – Manually adjust the Ground Balance setting, so the minimum amount of ground signal is heard.
2. Automatic Ground Balance – The detector automatically determines the best Ground Balance setting. This is quick, simple and more accurate than a manually set Ground Balance.
3. Tracking Ground Balance – The detector continuously adjusts the Ground Balance setting while detecting. This ensures that the Ground Balance setting is always correct.
Minelab detectors use exclusive advanced technologies for superior ground balancing capabilities that cannot be matched by any other detectors.
Discrimination
Discrimination is a metal detector’s ability to identify buried targets based on their conductive and/or ferrous properties. By accurately identifying a buried target you can decide to dig it up or consider it as junk and continue searching. Minelab detectors produce target identification (Target ID) numbers and/or Target Tones to indicate the type of target that has been detected.
There are four main types of discrimination in Minelab detectors:
1. Variable discrimination – The simplest type of discrimination which uses a control knob to adjust the level of discrimination.
2. Iron Mask/Iron Reject – Used mostly with gold prospecting detectors to ignore iron junk.
3. Notch discrimination – Allows specific target types to be accepted or rejected.
4. Smartfind – The most advanced form of discrimination. Target IDs are plotted based on both ferrous and conductive properties on a two dimensional (2D) display. Individual segments or larger areas of the display can be shaded to reject unwanted targets.
The most common question about metal detectors is ‘How deep do they go?’
The simple answer is "as deep as the diameter of the coil". So detectors with larger coils will detect deeper.
However, detection depth also depends upon detector technology and many environmental factors. A more complex answer usually starts with ‘It depends...’ The depth that a metal detector can detect a target depends on a number of factors:
 |
Target Size Large targets can be detected deeper than small targets. |
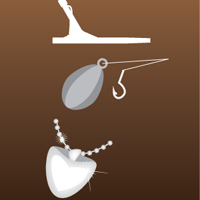
 |
Target Shape Circular shapes like coins and rings can be detected deeper than long thin shapes like nails. |
 |
Target Orientation A horizontal coin (e.g. lying flat) can be detected deeper than a vertical coin (e.g. on edge). |
 |
Target Material High conductive metals (e.g. silver) can be detected deeper than low conductive metals (e.g. lead or gold). |
Introducing Multi-IQ
Multi-IQ is Minelab’s latest major technology innovation and can be considered as combining the performance advantages of both FBS and VFLEX in a new fusion of technologies. It isn’t just a rework of single frequency VLF, nor is it merely another name for an iteration of BBS/FBS.
Multi-IQ achieves a high level of target ID accuracy at depth much better than any single frequency detector can achieve, including switchable single frequency detectors that claim to be multi-frequency. When Minelab use the term “multi-frequency” we mean “simultaneous” – i.e. more than one frequency is transmitted, received AND processed concurrently. This enables maximum target sensitivity across all target types and sizes, while minimising ground noise (especially in saltwater). There are presently only a handful of detectors from Minelab and other manufacturers that can be classed as true multi-frequency, all of which have their own advantages and disadvantages.
How does Multi-IQ compare to BBS/FBS?
Multi-IQ uses a different group of fundamental frequencies than BBS/FBS to generate a wide-band multi-frequency transmission signal that is more sensitive to high frequency targets and slightly less sensitive to low frequency targets. Multi-IQ uses the latest high-speed processors and advanced digital filtering techniques for a much faster recovery speed than BBS/FBS technologies. Multi-IQ copes with saltwater and beach conditions almost as well as BBS/FBS, however BBS/FBS still have an advantage for finding high conductive silver coins in all conditions.
With Multi-IQ, we can derive much greater target ID accuracy and increased detecting performance, especially in ‘difficult’ ground. In ‘mild’ ground, single frequency may perform adequately, BUT depth and stable ID’s will be limited by ground noise; whereas the Multi-IQ simultaneous multi-frequency will achieve maximum depth with a very stable target signal. In ‘strong’ ground, single frequency will not be able to effectively separate the target signal, giving decreased results; whereas Multi-IQ will still detect at depth, losing a minimal amount of target accuracy, as shown in this diagram.

“How many simultaneous frequencies?” you may ask, wondering if this is a critical parameter. Minelab has been carrying out detailed investigations into this in recent years. Just as you can colour in a map with many colours, the minimum number to differentiate between adjacent countries is only four. Similar to the map problem, it’s perhaps not the maximum number of frequencies needed to achieve an optimum result, but the minimum number that is more interesting. When it comes to frequencies in a detector, how the frequencies are combined AND processed is now more important than how many frequencies, for achieving even better results.

The Multi-IQ frequency range shown on thish chart applies to both the EQUINOX series & VANQUISH series detectors, in all models. There is no direct link between the individual single frequencies shown in the diagram and the frequencies used in Multi-IQ.
The above diagram demonstrates the typical sensitivity range of single frequency detectors, as compared with the full-spectrum sensitivity provided by Multi-IQ. Whilst a detector operating at 5kHz will be sensitive to high conductors, such as large silver targets, that same detector will be particularly unresponsive to small gold nuggets (low conductors). Conversely, a detector running at 40kHz has high sensitivity for small gold, and much less sensitivity to large silver. Multi-IQ is highly sensitive to all targets across the frequency range.


















